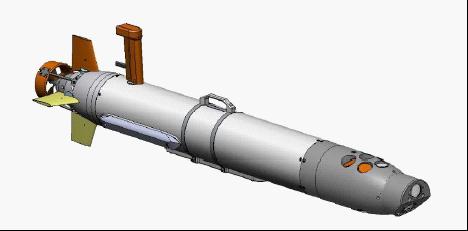
规格:
标准长度 : 49.8 英尺 (没有传感器)
管直径r: 5.8 英尺
重量: 44 Lbs (标准的机器)
深度评级: 100 米
耐久性:速度为2.5节,可持续 8-14小时; 取决于配置
速度范围: 1-4 节
通讯: 无线以太网 802.11g
电源: 2-pin 直流电牙
导航面: GPS (WAAS连接). 地下: 如有DVL 和指南针航位推算,底部跟踪可达到 40 m , 深度传感器, 和航速
追踪因特网数据标记: 可编程分辨率
软件矢量地图布置 : 任务计划和数据观察
声纳镶嵌:矢量地图布置叠加的处理声纳记录
uvc: 水下仪器的控制,操作,任务执行和远程控制
能源: 600-800 WHrs 的可充电锂电池电源,取决于设备的构造
板载电子: Intel ATOM 处理器和 Windows XP 嵌入系统;数据收集的固态硬盘可达128 GB
推进系统: 3-铸青铜螺旋桨叶片
控制:4个独立的控制板
附加的cpu: 在里Iver2 EP的低功率 1.6 GHz因特网新型的处理软片,只能应用于实验平台 (可扩展的有效载荷)
可选的传感器和声纳
旁扫声纳 : 双频 330/800 kHz
多波束声纳: 260 kHz; 梁数为: 120, 240, 480; 梁宽,传输和接受 : 120˚ x 3; 深度: 100 m
多普勒速度标记(DVL 选项)
4梁: 单频,低成本的向下照射的DVL,底部追踪导航,4个底部速度位置的梁
6梁:双频,精确的向下照射的DVL,底部追踪航向和高分辨率的测深仪。4个速度梁和2个垂直梁(一个向上,一个向下)
10梁: 双频,精确表面的向上和向下DVL,底部追踪航向和高分辨率的测深仪,4个速度梁和1个垂直梁(向下)测深仪或测高仪,和4 个速度梁和一个垂直梁(向上)机器或表面地位。
高度计: 专用的 500kHz垂直梁(从底部起的高度:从表面起的深度);最小到最大的范围:0.06到80米
底部追踪和交流剖面:1 MHz传感器:最小到最大的范围:0.06到35米;速度:±10m/s 精确度:±0.25% 其他报告速度为, ±0.25 cm/s;分辨率;0.001 m/s
传导性和温度 (NBOSI)
通讯: 表面-WIFI或900MHz
地下 – WHOI 微型调制调节器
相机:静止和视频摄像
安全系统的安全浮拖:紧急安全气囊回收系统
****发射器:水下定位和追踪
坚固的运输箱: 定做的气泡插入Iver2包括可折叠的展厅